【中学生创客.Arduino】第12课 摇头风扇
前面我们制作的风扇都是朝一个方向吹的,而家里的有些风扇是可以摇头的,能不能让我们的风扇也摇头呢?当然可以,这就需要舵机的加入了,这节课我们将了解舵机的有关知识,并制作出摇头风扇。
【任务导航】
1.了解舵机相关知识;
2.制作摇头风扇。
【材料阅读】
1.舵机简介
舵机,又称伺服电机,其工作过程是把所接收到的电信号转换成电动机轴上的角位移或角速度输出。目前广泛应用于机器人控制领域中。本书用到的舵机是TowerPro出品的SG90舵机,如图2.5.1所示。该舵机采用高强度ABS透明外壳配以内部高精度尼龙齿轮组,加上精准的控制电路、高档轻量化空心杯电机使该微型舵机的重量只有9克,而输出力矩达到了惊人的1.8kg*cm。标准的舵机有三条控制线,分别是电源、地和信号线。舵机的针脚定义为:棕色线——GND,红色线——5V,橙色线——信号线。

图2.5.1 SG90舵机
舵机的控制一般需要不断地发给它一个高电平时间在1-2ms之间、低电平时间在5-20ms之间的脉冲信号。注意:Arduino板上支持舵机的只有数字口9和10,因此舵机橙色线只能连接数字口9或10,另外我们使用的SG90舵机转动角度在0-180°之间。
2.“当”循环
“当”循环的含义是,当条件满足时,循环执行内部语句,直到条件不满足时跳出循环。ArduBlock中为我们提供了“当”循环模块,如图2.5.2所示。
图2.5.2 “当”循环
【动手操作】
主题:制作我的摇头风扇
同学们在了解了相关的知识后,可以自己制作本课的摇头风扇了,我们用到的器材主要是Romeo板子、舵机、风扇(带直流电机)。
1.摇头风扇的连接
在连接物理电路时,需要注意:舵机接到数字口(程序中,舵机连接的是数字口9,电机接的是M1接线柱)。
2.控制舵机从0°转到180°的参考程序

图2.5.3 控制舵机
3.摇头风扇的参考程序
摇头风扇是舵机从0°转到180°,然后再转回来,并且一直保持风扇的电机开启即可,如下所示。
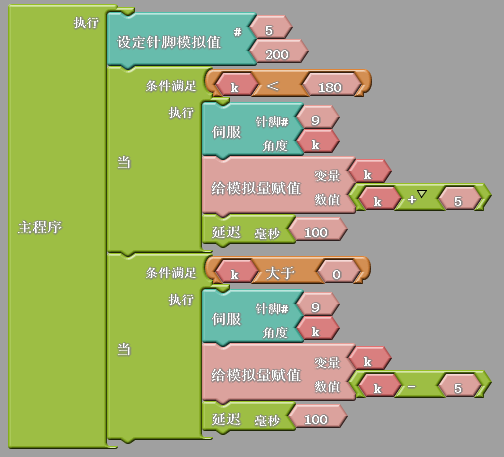
图2.5.4 摇头风扇
【探究思考】
请同学们观察一下,风扇都是自动摇头,我们可以控制它吗?讨论一下,如何实现?
【视野拓展】
1.舵机的工作原理
舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就像我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
2.舵机的控制方式
舵机的伺服系统由可变宽度的脉冲来进行控制,控制线是用来传送脉冲的。脉冲的参数有最小值,最大值,和频率。一般而言,舵机的基准信号都是周期为20ms,宽度为1.5ms。这个基准信号定义的位置为中间位置。舵机有最大转动角度,中间位置的定义就是从这个位置到最大角度与最小角度的量完全一样。最重要的一点是,不同舵机的最大转动角度可能不相同,但是其中间位置的脉冲宽度是一定的,那就是1.5ms。如图2.5.5所示。
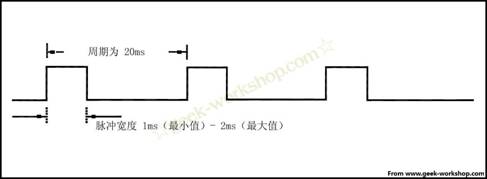
图2.5.5 脉冲宽度
角度是由来自控制线的持续的脉冲所产生。这种控制方法叫做脉冲调制。脉冲的长短决定舵机转动多大角度。例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。当控制系统发出指令,让舵机移动到某一位置,并让他保持这个角度,这时外力的影响不会让它的角度产生变化,但是这个是由上限的,上限就是他的最大扭力。除非控制系统不停的发出脉冲稳定舵机的角度,舵机的角度不会一直不变。当舵机接收到一个小于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转一定角度。接收到的脉冲大于1.5ms情况相反。不同品牌,甚至同一品牌的不同舵机,都会有不同的最大值和最小值。一般而言,最小脉冲为1ms,最大脉冲为2ms。如图2.5.6所示。
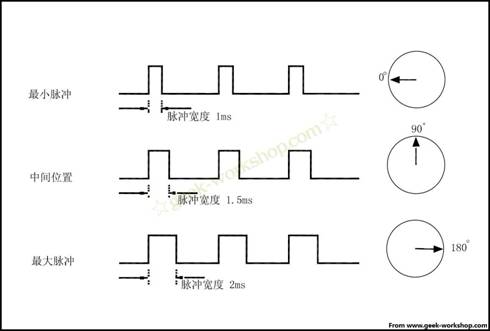
图2.5.6 脉冲宽度与转动角度
【挑战自我】
摇头风扇很不错吧?但是我们并不希望它一直在摇头,有什么办法可以控制它吗,以便于我们让它摇头才摇头,不让它摇头就停止摇头,试一试吧。<< 上一篇
下一篇 >>
网友留言(0 条)