第三节 色彩感知
一、任务初探
本课机器人的起始位置及任务说明如下。
1.起始位置为灰色小方块位置,且起始方向为箭头所示方向;
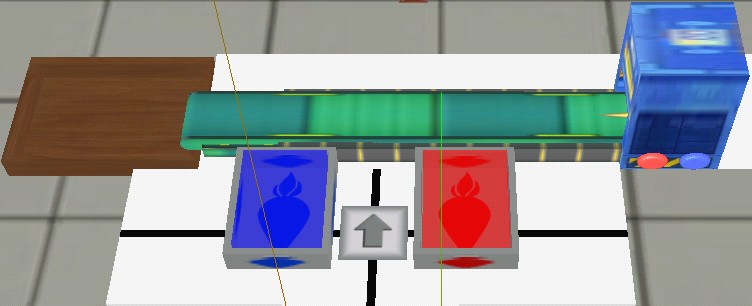
2.传送机将两种不同颜色零件从右向左源源不断地送来,机器人要将蓝色零件放入左边的蓝色箱子内,将红色零件放入右边的红色箱子。各完成 3 个及以上算成功完成任务。
图 4-3-1 场地任务示意图
思考:
1.工厂中传送带送来的零件可能...
/
732 次浏览/
虚拟机器人
第二节 疯狂拣取
一、任务初探
这节课我们的机器人面对的不是工作台上一个静止的零件,而是传送带上源源不断送来的大量零件。机器人的起始位置及任务说明如下。
1.起始位置为灰色小方块位置,且起始方向为箭头所示方向;
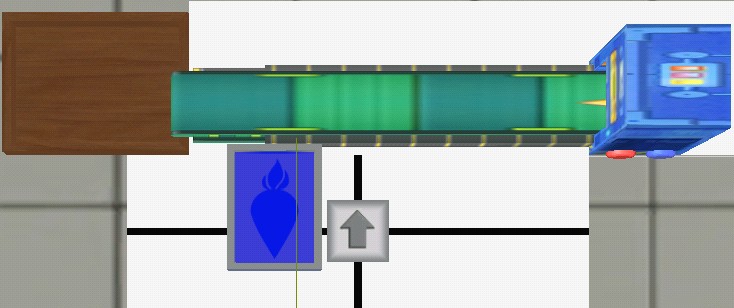
2.传送机将零件从右向左源源不断地送来,机器人要将零件从传送带上拿起放入左边的蓝色箱子内。完成 5 个及以上算成功完成任务。
图 4-2-1 场地任务示意图
二...
/
688 次浏览/
虚拟机器人
第一节 智能抓取
一、任务初探
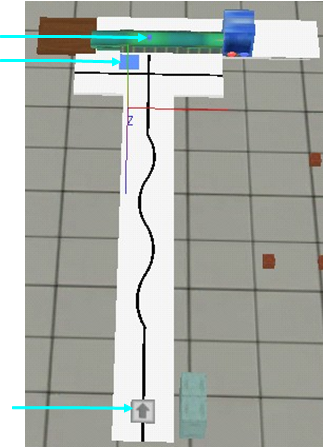
本课我们的机器人将走入工厂生产车间,起始位置为灰色小方块位置,起始方向为箭头所示方向,现需要完成以下任务,如图 4-1-1 所示。
1.从起始位置出发,沿黑色轨迹道路来到工作台前方;
2.抓取工作台上放置好的零件,将其放置到左边蓝色区域内。
在前面的课程中,主控制器装配上直流电机和轮子构成了机器人最基本的结构。在相应程序的控制下机器人具备了类似人类腿脚的功能:前进、后退...
/
698 次浏览/
虚拟机器人

第四节 胜利在望
机器人绕过了狭长的盘山小路,来到了宝物所在的一个平台上。宝物就在机器人的正前方,闪着璀璨的光芒,似乎在对你说,快来取我吧!别急,要拿到宝物还有最后一关。
一、任务初探
如图 3-4-1 所示,宝物被三个大小不同的正方形包围着,这三个正方形的中心点是同一个地方,也是宝物的所在位置。但是这个中心点的位置是不固定的,每次开始仿真时随机出现,但保证是在机器人起始位置的正前方。宝物看得到,却摸不着,机器人可以穿过宝物而不被挡住...
/
711 次浏览/
虚拟机器人

第三节 盘山小路
机器人惊险的穿过了悬浮桥,现在它来到了一个丁字形路口,从图 3-3-1 上分析,往右转,是一条断头路;往左转,是一条盘山小路。小路环绕着山体向上,宝藏就在一定高度的山上等着我们呢。那我们是要左转还是右转呢?那当然是左转上山咯。
图 3-3-1
一、任务初探
机器人过了悬浮桥后,初始朝向就不是很确定了。有时候朝向左边,有时候朝向右边, 还有时候大致朝着中间。机器人的朝向是随机出现的...
/
639 次浏览/
虚拟机器人
数字IO
本章节介绍了掌控板的I/O引脚的数字输入输出使用方法。引脚是掌控板与连接到它的外部设备进行通信的方式。掌控板可以通过拓展板将IO引脚拓展并连接控制或读取其他元器件或模块。
注意:
除P2(只限数字输入)P3,P4,P10以外,其他引脚均可是使用数字输入、输出模式。有关更详细说明,请查看 :ref:`掌控板接口引脚说明<mPythonPindesc>` 。
数字输入
首先,从如何读取引脚的数字输入开...
/
1642 次浏览/
掌控板
串口
串口基本概念
串口原理
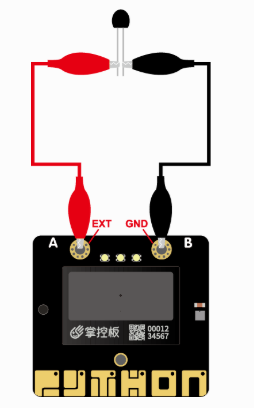
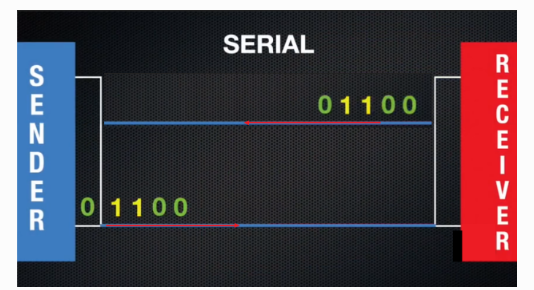
串口通信的英文缩写是UART(Universal Asynchronous Receiver Transmitter) 全称是通用异步收发器。听起来很高深的概念,其实就如下图,两个设备,一根线串起来,发送方在线的一头将数据转换为二进制序列,用高低电平按照顺序依次发送01信号,接收方在线的另一头读取这根信号线上的高低电平信号,对应转化为二进制的01序列。 异步收发指的就是全双工传输,即发送数据的同时也能够接...
/
1319 次浏览/
掌控板

网络基础
MicroPython :mod:network 模块用于配置WiFi连接。有两个WiFi接口,STA模式即工作站模式(ESP32连接到路由器), AP模式提供接入服务(其他设备连接到ESP32)。如需了解MicroPython的网络连接方法,请查阅 :mod:network 模块。
STA模式
掌控板以基于network模块封装 :mpython.wifi()<mpython.wifi>&n...
/
1386 次浏览/
掌控板
加速度
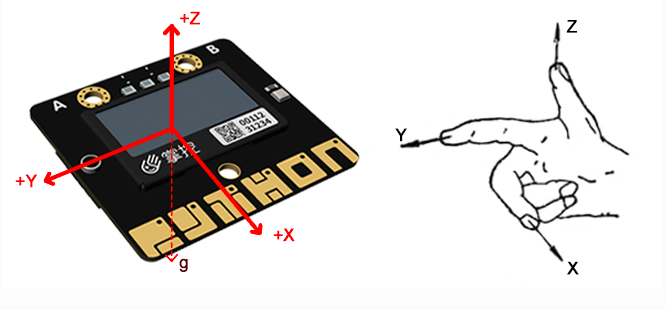
加速度传感器能够测量由于重力引起的加速度,传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。掌控板上的加速度计可测量加速度,测量范围为 -2g 到 +2g 之间。
掌控板的测量沿3个轴,每个轴的测量值是正数或负数,正轴越趋近重力加速度方向,其数值往正数方向增加,反之往负数方向减小,当读数为 0 时,表示沿着该特定轴“水平”放置。
X - 向前和向后倾斜。
Y - 向左和向...
/
1182 次浏览/
掌控板

光线传感器
掌控板板载光线传感器,可以用其感知周边环境的光线变化。
例:光控灯:
from mpython import *
while True:
oled.fill(0) #清屏
oled.DispChar("亮度:",30,16) #显示亮度
oled.DispC...