第二节 紧急让道随行
一、任务初探
大家一定在马路上见过一路响着警铃呼啸而过的救护车,车上往往载着濒临死亡的病人,为了挽救这些生命,交通规则赋予了他们先行的权利。当我们的机器人小车遇到了救护车,为了生命,同样需要让道。但是在让道的同时,为了保证我们自己的事情不被耽误,我们可以紧跟着救护车行驶。那么,在搭建机器人小车的时候,需要用哪些传感器才能实现这个功能呢?传感器的安装位置又该如何选择?跟随救护车行驶的程序又该如何编写?
上节课,我们...
/
612 次浏览/
虚拟机器人

第一节 赛车抢分
一、任务初探
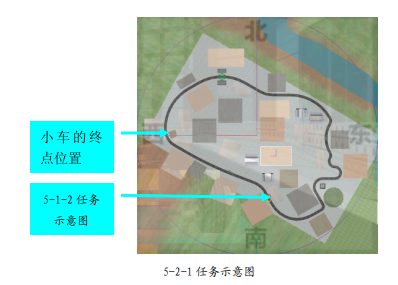
同学们一定都玩过赛车游戏吧?在赛车游戏中,往往途中会遇到各种得分物,获得这些物体后,有的能给自己加上一定的分数,有的能给自己的赛车加速,有的能给对手的赛车造成伤害。那么,如果我们来设计一辆赛车,想在跑道上行驶过程中获取得分物,需要如何构建我们的小车呢?程序又该怎么编写才能达到我们的目标?
5-1-1 任务示意图
本节课中,我们机器人小车的任务是,沿着赛道上一段指定的路线行驶,...
/
639 次浏览/
虚拟机器人
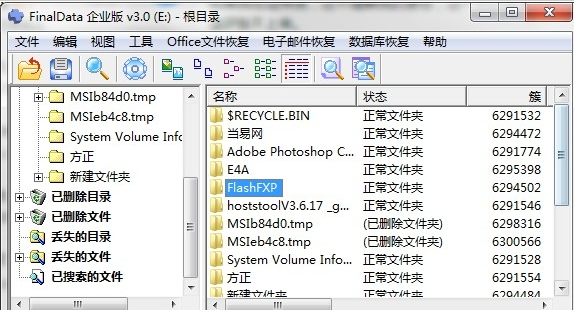
1、支持通过直接扫描目标磁盘抽取并恢复出文件信息(包括文件名、文件类型、原始位置、创建日期、删除日期、文件长度等)
2、一般来说,只要没有被覆盖的数据,使用finaldata都是可以完全恢复
3、支持恢复因各类原因丢失的文件,包括但不仅限于误删除的文件,误格式化的数据,误ghost操作后的数据丢失,u盘提示“文件或目录损坏且无法读取”等
4、扫描速度快,恢复效果好,操作简易
5、支持电脑硬盘、u盘、移动硬盘、...
/
1592 次浏览/
系统工具
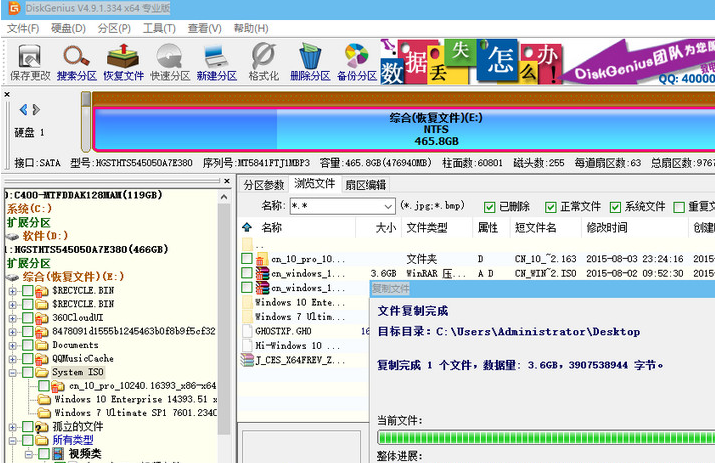
DiskGenius是一款专业级的 数据恢复软件 ,算法精湛、功能强大!
文件恢复:文件误删除、分区误格式化、分区损坏打不开等;
分区恢复:误Ghost、误删除、重新分区及各种原因导致的分区丢失;
文件预览:支持文本、图片、Office文档、音频、视频等被恢复文件的
预览功能。数据能否成功恢复,一目了然;
扇区编辑:为数据恢复专家提供扇区编辑等高级手工数据恢复功能;
DiskGenius还是一款功能全面,安全可靠的 硬...
/
2119 次浏览/
系统工具
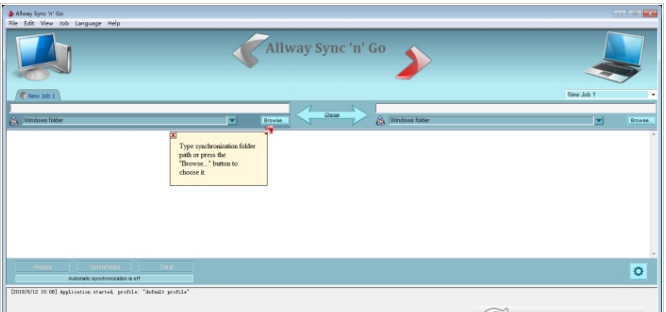
Allway Sync是一款非常好用的Windows文件同步软件,受到了大家的认可,使用创新的同步算法来同步桌面PC、膝上型计算机、USB驱动器、远程FTP/SFTP和WebDAV服务器、各种在线数据存储等之间的数据,支持数据压缩和加密。它结合了防弹可靠性和极容易使用的界面,可以通过同步网关将您的PC数据与Mac同步,可以在几个文件夹之间进行文件同步,并且会自动将更新的文件覆盖掉同步文件夹的旧文件,非常方便。...
/
615 次浏览/
系统工具
第三节 色彩感知
一、任务初探
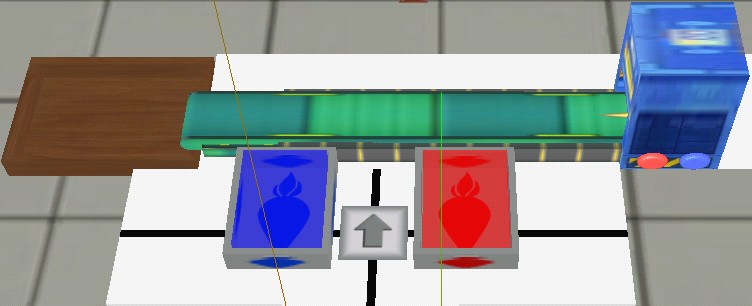
本课机器人的起始位置及任务说明如下。
1.起始位置为灰色小方块位置,且起始方向为箭头所示方向;
2.传送机将两种不同颜色零件从右向左源源不断地送来,机器人要将蓝色零件放入左边的蓝色箱子内,将红色零件放入右边的红色箱子。各完成 3 个及以上算成功完成任务。
图 4-3-1 场地任务示意图
思考:
1.工厂中传送带送来的零件可能...
/
732 次浏览/
虚拟机器人
第二节 疯狂拣取
一、任务初探
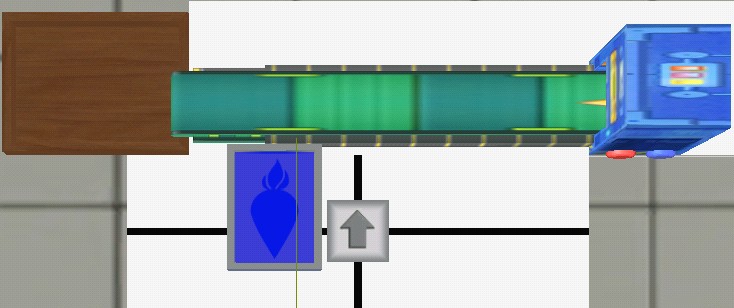
这节课我们的机器人面对的不是工作台上一个静止的零件,而是传送带上源源不断送来的大量零件。机器人的起始位置及任务说明如下。
1.起始位置为灰色小方块位置,且起始方向为箭头所示方向;
2.传送机将零件从右向左源源不断地送来,机器人要将零件从传送带上拿起放入左边的蓝色箱子内。完成 5 个及以上算成功完成任务。
图 4-2-1 场地任务示意图
二...
/
689 次浏览/
虚拟机器人
第一节 智能抓取
一、任务初探
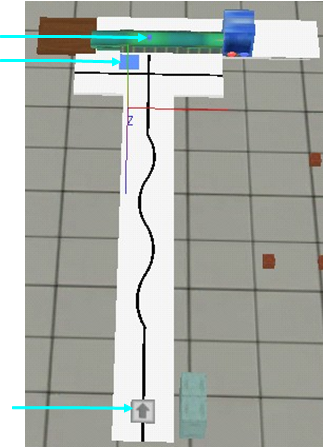
本课我们的机器人将走入工厂生产车间,起始位置为灰色小方块位置,起始方向为箭头所示方向,现需要完成以下任务,如图 4-1-1 所示。
1.从起始位置出发,沿黑色轨迹道路来到工作台前方;
2.抓取工作台上放置好的零件,将其放置到左边蓝色区域内。
在前面的课程中,主控制器装配上直流电机和轮子构成了机器人最基本的结构。在相应程序的控制下机器人具备了类似人类腿脚的功能:前进、后退...
/
698 次浏览/
虚拟机器人

第四节 胜利在望
机器人绕过了狭长的盘山小路,来到了宝物所在的一个平台上。宝物就在机器人的正前方,闪着璀璨的光芒,似乎在对你说,快来取我吧!别急,要拿到宝物还有最后一关。
一、任务初探
如图 3-4-1 所示,宝物被三个大小不同的正方形包围着,这三个正方形的中心点是同一个地方,也是宝物的所在位置。但是这个中心点的位置是不固定的,每次开始仿真时随机出现,但保证是在机器人起始位置的正前方。宝物看得到,却摸不着,机器人可以穿过宝物而不被挡住...
/
712 次浏览/
虚拟机器人

第三节 盘山小路
机器人惊险的穿过了悬浮桥,现在它来到了一个丁字形路口,从图 3-3-1 上分析,往右转,是一条断头路;往左转,是一条盘山小路。小路环绕着山体向上,宝藏就在一定高度的山上等着我们呢。那我们是要左转还是右转呢?那当然是左转上山咯。
图 3-3-1
一、任务初探
机器人过了悬浮桥后,初始朝向就不是很确定了。有时候朝向左边,有时候朝向右边, 还有时候大致朝着中间。机器人的朝向是随机出现的...
/
640 次浏览/
虚拟机器人