光线传感器
掌控板板载光线传感器,可以用其感知周边环境的光线变化。
例:光控灯:
from mpython import *
while True:
oled.fill(0) #清屏
oled.DispChar("亮度:",30,16) #显示亮度
oled.DispC...
麦克风
掌控板板载麦克风,可以用其感知周边环境的声音变化。
例:显示声音值
from mpython import *
while True:
oled.fill(0)
oled.DispChar('声音:',0,16)
oled.DispChar("%d" % (sound.read()),40,20)
oled.show()
使用前,导入mp...
触摸按键
在掌控板正面金手指处拓展6个触摸按键,依次P、Y、T、H、O、N。
示例-触摸不同按键,点亮不同色RGB灯
from mpython import *
while True:
if(touchPad_P.read() < 100):
rgb[0] = (255,0,0) # 开灯,设置红色
rgb[1] = (255,0,0) # 设定为红色
rgb[2...
按键
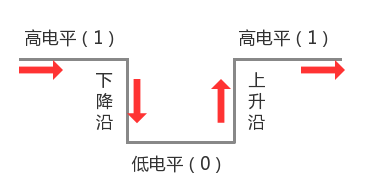
在掌控板上部边沿有按压式A、B两个按键。当按下按键时为低电平,否则高电平。
在掌控板A,B按键按下的过程如下述,当按下时,电平从高变低,在高电平(1)变为低电平(0)的那一瞬间叫作下降沿。当按键松开时,电平从低变高,在低电平(0)变为高电平(1)的那一瞬间叫作上升沿。 我们可以通过获取电平变化来获取,当前按键状态。
获取按键状态
示例-按A键开灯,按B键关灯
from mpython import *...
音乐
掌控板板载无源蜂鸣器,其声音主要是通过高低不同的脉冲信号来控制而产生。声音频率可控,频率不同,发出的音调就不一样,从而可以发出不同的声音,还可以做出“多来米发索拉西”的效果。
内置旋律
掌控板有很多内置的旋律,完整的清单如下:
music.DADADADUM
music.ENTERTAINER
music.PRELUDE
music.ODE...
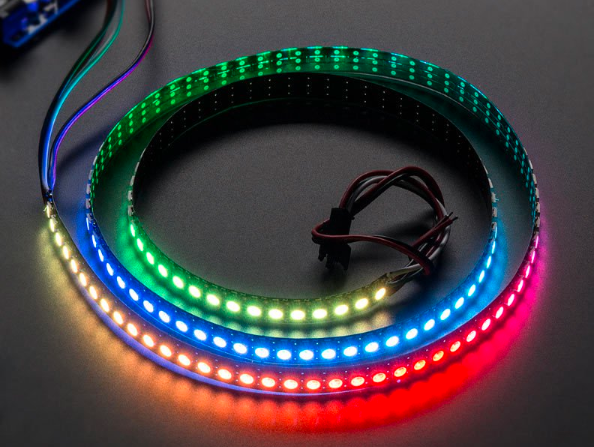
RGB LED
mPython掌控板载3颗WS2812灯珠,WS2812是一种集成了电流控制芯片的低功耗的RGB三色灯,可实现256级亮度显示,完成16777216种颜色的全真色彩显示。采用特殊的单线通讯方式控制RGB灯的颜色,使用简单。
板载RGB LED
例:点亮RGB LED
from mpython import *
rgb[0] = (255, 0, 0) # 设置为红色,全亮度
rgb...
显示
掌控板板载1.3英寸OLED显示屏,分辨率128x64。采用[Google Noto Sans CJK][Google Noto Sans CJK]开源无衬线字体字体。字体高度16像素点。支持简体中文,繁体中文,日文和韩文语言。
提示:
oled为 machine.framebuf 衍生类,所以继承framebuf的方法,详细使用可查阅 framebuf。
文本显示
使用前,...
说明
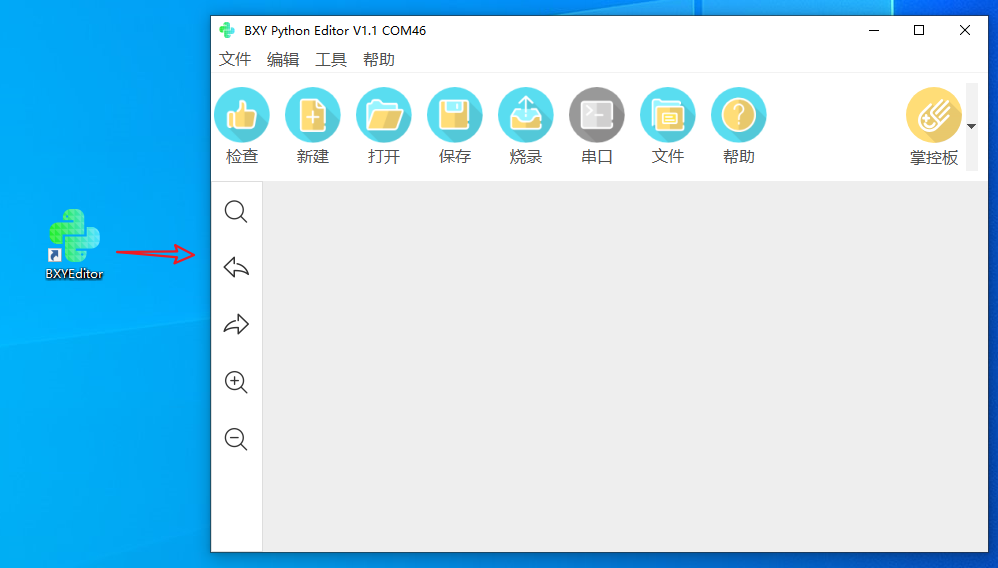
BXY可以对掌控板进行编程,掌控板板载分辨率128x64的1.3英寸OLED显示屏,本节课程教你BXY操作掌控板的基础操作,完成屏幕显示“Hello World”的效果。
连接掌控板
运行BXY Python Editor,将打开主界面。
使用USB线连接电脑与掌控板。
注意: 如果是第一次在电脑上使用掌控板,需要安装驱动。...
2022-04-28 /
1085 次浏览 /
掌控板
第二节 穿越浮桥
机器人历尽艰辛,终于从神秘的迷宫里转出来了,离寻到宝藏近了一步。但是,出现在它眼前的是一段飘渺的悬浮桥,可千万不要向下看哦,桥的两边是无尽的深渊,可怕的是, 这桥竟然没有栏杆,掉下去就,就……,不敢想象。机器人不禁打起退堂鼓来。
一、任务初探
这个任务要求机器人从悬浮桥的一段出发,安全的穿越悬浮桥,到达另一端。规则中设定好只要机器人到达另一端,任务即成功,机器人停止运行,所以我们...
2022-04-21 /
632 次浏览 /
虚拟机器人
第一节 神秘迷宫
首先出现在机器人面前的是一个神秘的迷宫。迷宫错综复杂,机器人在里面会不会晕头转向,迷了方向呢?
一、任务初探
这个任务要求机器人走出魔幻迷宫,来到悬浮桥入口。迷宫俯视图如图 3-1-1 所示。
1.起始位置为左下角蓝色小方块位置,且起始方向为箭头所示方向;
2.从起始位置出发,沿着魔幻迷宫的左墙壁一直搜索前进,直到走出迷宫;
3.在迷宫的...
2022-04-21 /
533 次浏览 /
虚拟机器人